Dr. Oswaldo Ulises Juárez Sandoval

Doctor en Comunicaciones y Electrónica por el Instituto Politécnico Nacional.
Desempeño actual: SNI 1, Profesor de asignatura A en el departamento de Ingeniería en Comunicaciones y Electrónica del IPN y Profesor de Asignatura en la Sección de Estudios de Posgrado e Investigación de la ESIME Culhuacan del mismo Instituto. Líneas de investigación centrales: Análisis y Procesamiento de Señales, Análisis y Reconocimiento de Patrones, Programación y seguridad en dispositivos loT y sistemas digitales para aplicaciones en electrónica de potencia y sistemas de energía, Ciberseguridad en Sistemas Electrónicos de Potencia, Aplicaciones de Machine Learning y Deep Learning, son sus más de 38 publicaciones y 30 direcciones de tesis, 6 proyectos financiados y una estancia Posdoctoral en la Facultad de Ingeniería de la UNAM. Reconocimientos: Del 2020 al 2022 y del 2023 a la fecha ha recibido la distinción de candidato a investigador nacional e investigador nacional nivel 1, respectivamente por el Sistema Nacional de Investigadoras e Investigadores de la SECIHTI. Colabora en: la Red de Investigación en Computo del IPN y en diversos proyectos institucionales, es revisor en revistas como Springer, Elsevier, IEEE y Electronics, Symmetry, SPIE, Taylor and Francys, Applied Sciences, Mathematics, Sensors, Informatics, Imagining.
ojuarezs@ipn.mx
Sistema de Frenado Autónomo de Emergencia (AEBS)
42
Figura 1. Diagrama General de un Sistema de Frenado Autónomo de Emergencia (AEBS)
Figura 2. Monitoreo para el Sistema de Frenado Autónomo de Emergencia (AEBS)
Detección de peatones para un AEBS
43
Figura 2. Detección de peatones para un AEBS y Estimación de la distancia entre auto vs peatón por visión artificial.
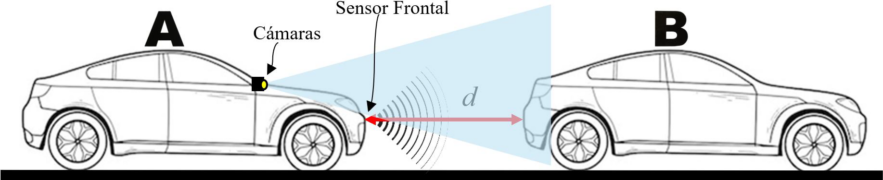
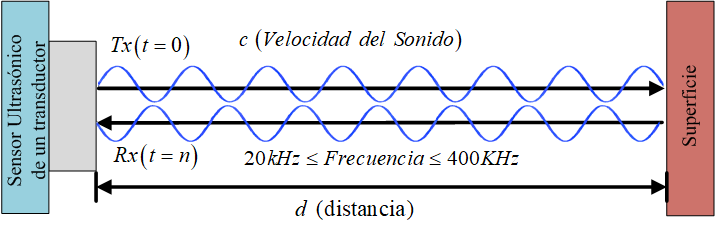
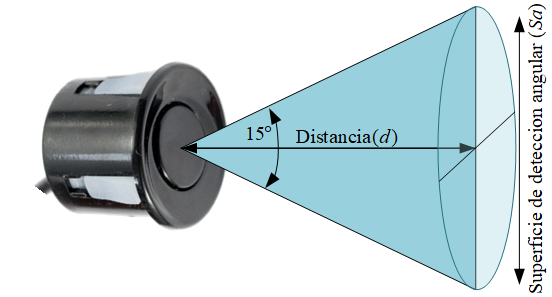
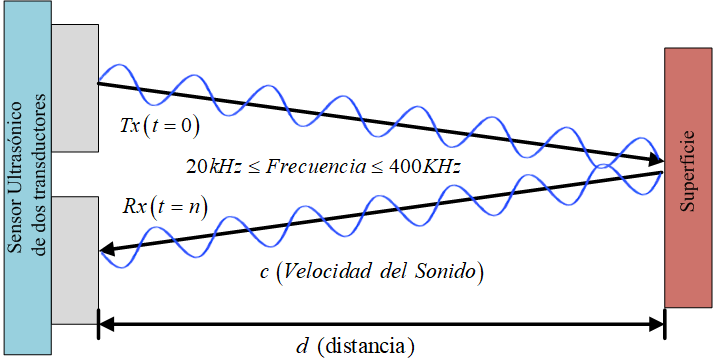
Estimación de la distancia entre auto vs peatón por arreglo de sensores
44
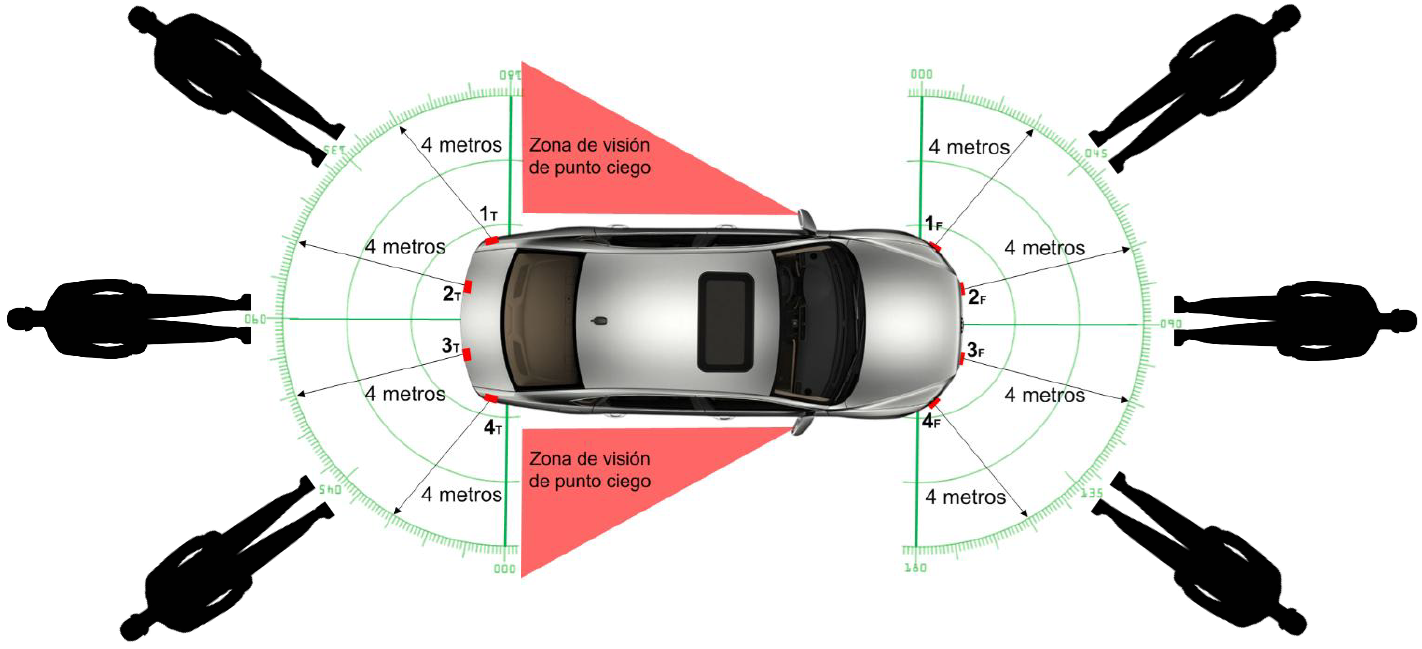
Figura 3. Localización de Sensores ultrasónicos en un modelo controlado
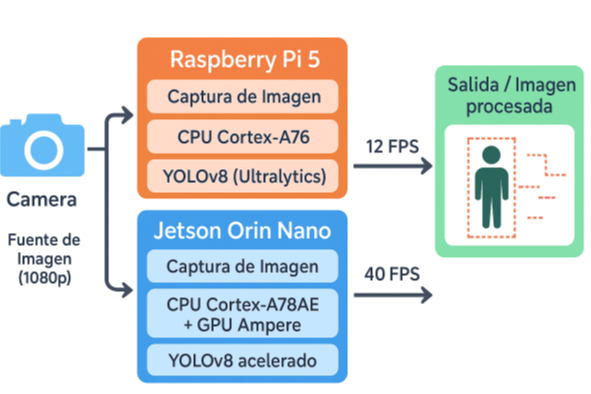
Dispositivos para el análisis y procesamiento de información.

45
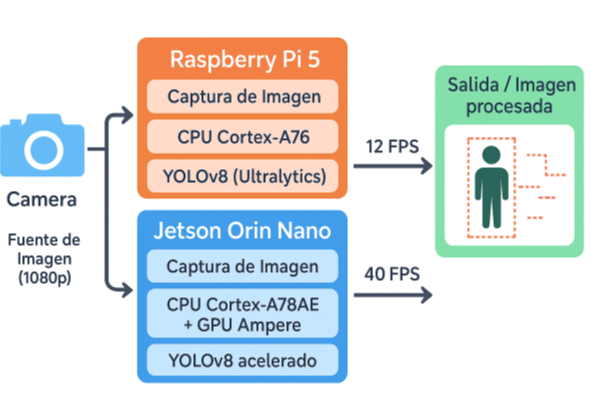
Modelo para el análisis y procesamiento de la información
46
Figura 4. Modelo para el procesamiento de información,
Figura 5. Resultados de la estimación de la distancia,
Control de Velocidad por PWM
47
Figura 6. Control de velocidad de motores de tracción PMSM
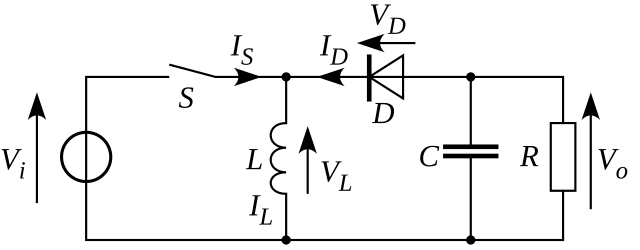
Frenado de motor PMSM (Permanent Magnet Synchronous Motor)
48
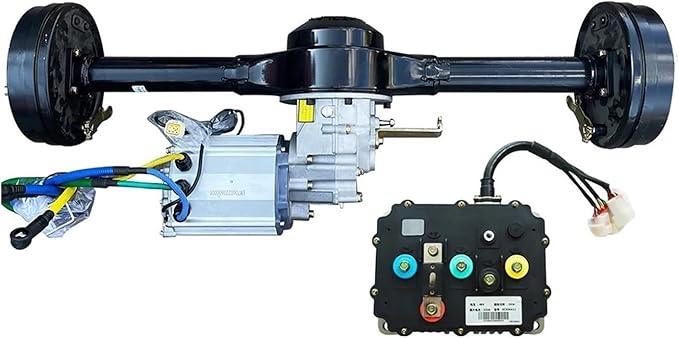
Figura 7. Sistema de tracción para vehículos eléctricos basado en motores PMSM
Figura 8. Freno automotriz ABS